OpenVINO
ホーム
タグ
「2020.2」の記事一覧
2021年4月9日
OpenVINO toolkit 2021.3 ベンチマーク
2021年2月28日
OpenVINO toolkit 2021.1 ベンチマーク
2020年7月18日
OpenVINO toolkit 2020.4 ベンチマーク
2020年7月11日
環境構築(apt ubutu18.04編)
2020年6月9日
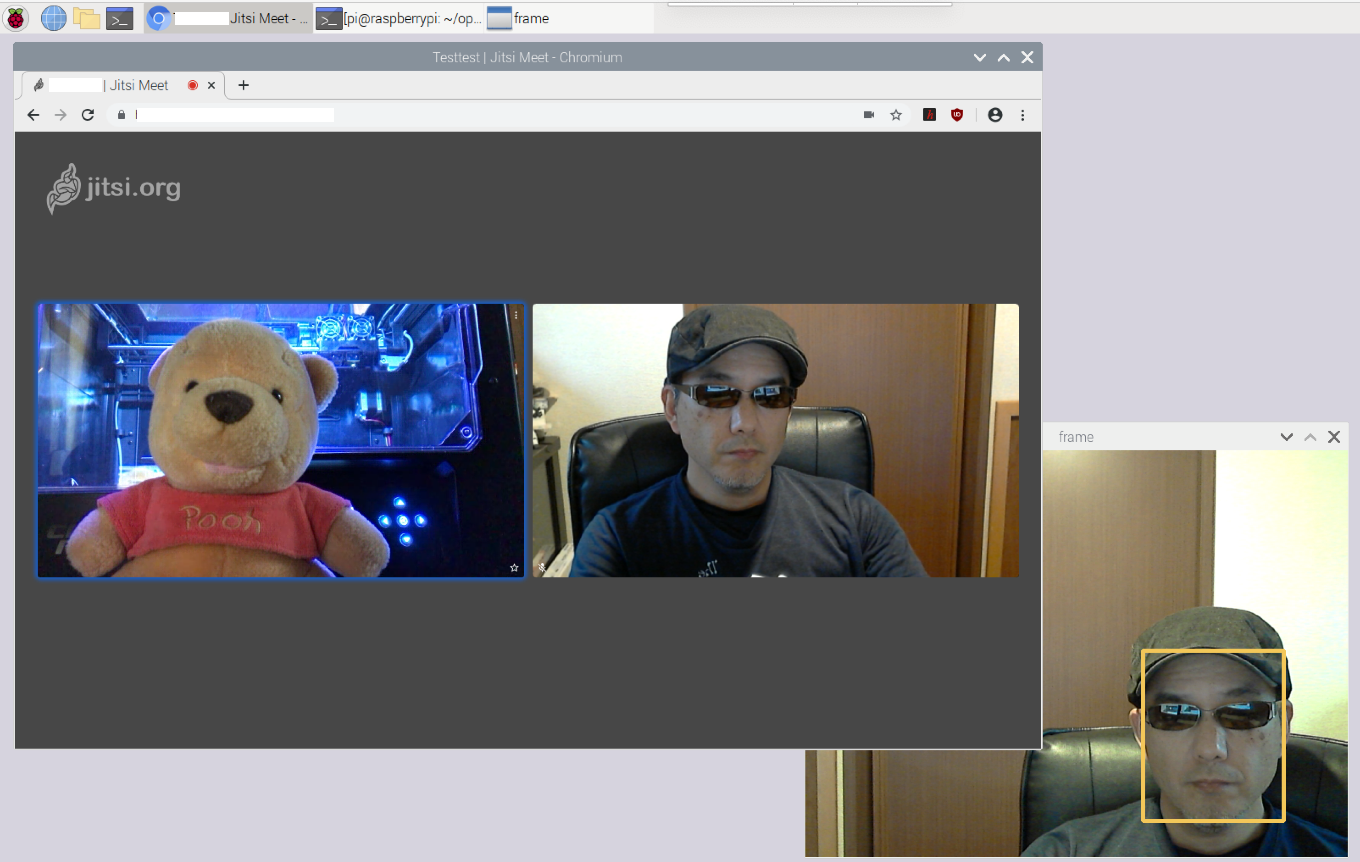
ビデオ会議でのwebカメラのオン・オフユースケース(姿勢推定編)
2020年6月6日
ビデオ会議でのwebカメラのオン・オフユースケース(顔認識編)
2020年5月16日
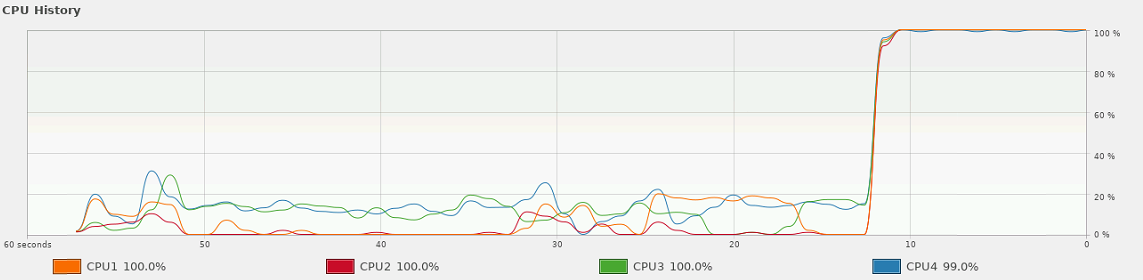
高負荷環境でのベンチマーク
2020年5月9日
環境構築(ubuntu18.04編)
2020年5月8日
Intel DevCloud for the Edge を使い倒す(その7)
2020年5月7日
Intel DevCloud for the Edge を使い倒す(その6)
1
2
3